The Single Strategy To Use For Brushed vs Brushless Motors: What's the Difference? - PTR


The Best Strategy To Use For Small brushless motors - MinebeaMitsumi
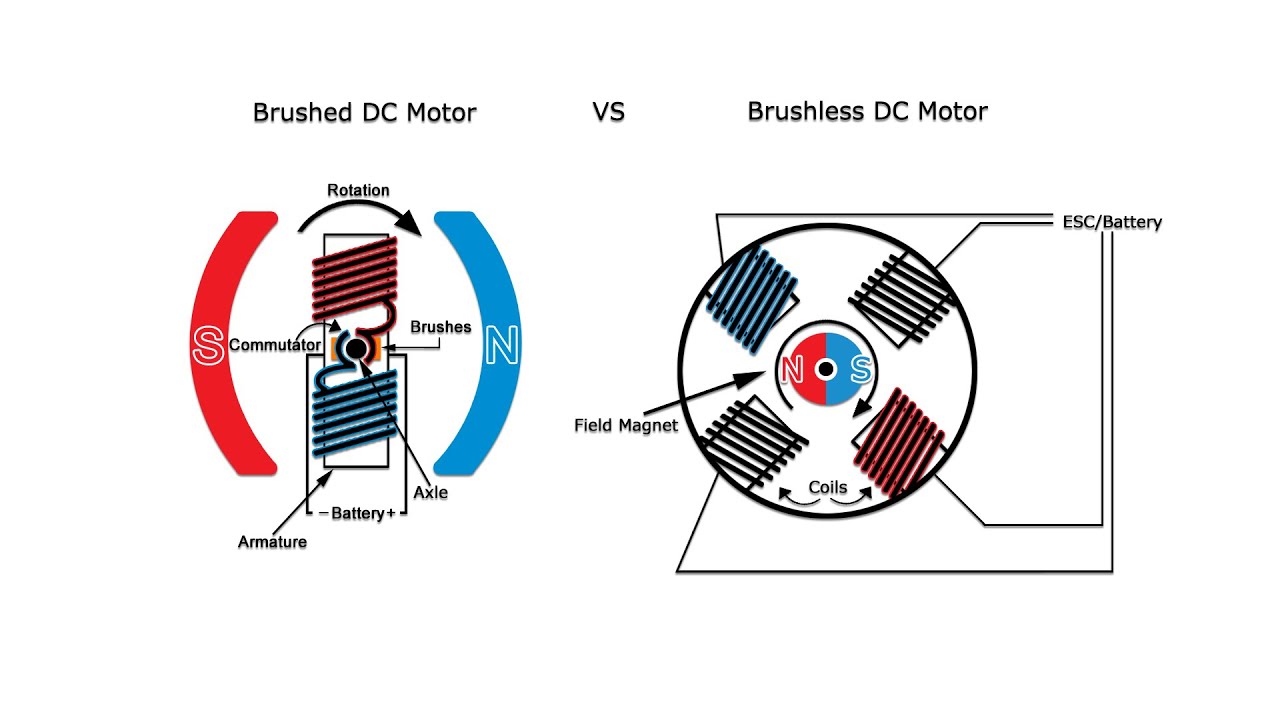
When converting electrical power into mechanical power, brushless motors are more efficient than brushed motors mainly due to the absence of brushes, which decreases power loss due to friction. The boosted performance is biggest in the no-load and low-load areas of the motor's performance curve. Environments and requirements in which manufacturers use brushless-type DC motors consist of maintenance-free operation, high speeds, and operation where stimulating is harmful (i.
Brushless DC Motors - Adafruit Motor Selection Guide - Adafruit Learning System
explosive environments) or could affect digitally delicate devices. The building and construction of a brushless motor looks like a stepper motor, but the motors have important differences due to differences in implementation and operation. While ARC Systems are often stopped with the rotor in a specified angular position, a brushless motor is usually planned to produce constant rotation.

NEO 550 Brushless Motor - REV Robotics
Both a stepper motor and a properly designed brushless motor can hold limited torque at zero RPM. Controller applications [modify] Because the controller carries out the standard brushes' functionality it requires to understand the rotor's orientation relative to the stator coils. This is automatic in a brushed motor due to the fixed geometry of the rotor shaft and brushes.
Excitement About CobraMotorsUSA.com - Cobra Brushless Motors, ESC's and
Others determine the back-EMF in the undriven coils to infer the rotor position, getting rid of the need for different Hall impact sensors. These are for that reason often called sensorless controllers. Controllers that sense rotor position based upon back-EMF have additional obstacles in initiating motion due to the fact that no back-EMF is produced when the rotor is fixed.
Ezrun MAX Brushless Motors (5687 / 56113 / 4985) – HOBBYWING North America
This can cause the motor to run in reverse quickly, adding even more complexity to the start-up sequence. Other sensorless controllers can determining winding saturation brought on by the position of the magnets to infer the rotor position. [] A typical controller consists of 3 polarity-reversible outputs managed by a logic circuit.

More sophisticated controllers utilize a microcontroller to manage acceleration, control motor speed and fine-tune performance. 2 key efficiency parameters of brushless DC motors are the motor constants K T \ displaystyle K _ T (torque constant) and K e \ displaystyle K _ e (back-EMF continuous, likewise referred to as speed consistent K V = 1 K e \ displaystyle K _ V = 1 \ over K _ e ).